EUROPA DIRECT
ENCOUNTER MISSION
uncovering the mysteries
of the blackest ocean

Loading...
Europa is the second and the smallest of the four Galilean moons orbiting Jupiter. Being slightly smaller than Earth's moon, it orbits Jupiter every 3.5 days and is locked by gravity to it, so the same hemisphere of the moon always faces the planet. Europa's gravity is only about 13 percent of Earth's, resulting in a virtually absence of an atmosphere.
Europa has the smoothest surface of any known solid object in the Solar System, which consists of water ice. The surface is covered by small irregular and long linear fractures. Based on the small number of craters observed, the surface of this moon appears to be no more than 40 to 90 million years old, which is quite young in geologic terms.
The apparent youth and smoothness of the Europa’s surface have led to the hypothesis that a water ocean exists beneath it, which could conceivably harbor extraterrestrial life. While evidence for this internal ocean is quite strong, its presence awaits confirmation by future space missions. And the most challenging one would be a landing mission to Europa, aimed at penetrating through the ice crust, taking water probes and reaching the bottom of the sub-surface ocean in search for signs of extraterrestrial life forms.
Europa is unique among the large icy satellites. Its geodynamically active and relatively thin ice crust, which may reach down to 3…30 km (2…20 miles), covers the global water ocean with depth of over 100 km (60 miles). Along with a liquid ocean, Europa also likely harbors a rocky sea floor that can supply energy and elements needed to drive metabolism.
The temperature on the surface of Europa averages about minus 160 degrees Celsius (minus 260 degrees Fahrenheit) near the equator and minus 220 C (minus 370 F) near the poles. At such low temperatures the ice on the surface becomes as hard as a rock. But beneath the shell of hard cold ice there are layers of warm ice. Due to the tidal forces the ice crust bends, which results in tectonic activity in upper layers of the crust and makes Europa one of the most geologically interesting bodies in the solar system.
For these reasons Europa’s unusual surface is dominated by features in the form of linear ridges, bands, and fractures. The most striking of them are dark streaks crisscrossing the entire globe, called lineae. The most likely hypothesis states that the lineae on Europa may have been produced by a series of eruptions of warm ice as the crust spread open to expose warmer layers beneath.
Recently, the Hubble Space Telescope caught signs of possible water vapor plumes that erupt from beneath the icy surface. Still there is no evidence that these plumes originate from the sub-surface ocean or just a result of tectonic activity in outer layers of ice. This leads to the necessity in considering different possible ways of reaching Europa's inner ocean in the frame of future landing missions.
The heat from tidal flexing allows the Europa's subsurface ocean to remain liquid. But several kilometers of ice above it defy the ingenuity of ice penetration tools that will constitute the payload of the future landing mission to Europa.
There exist several methods to penetrate through the Europa's ice crust, which are mainly based on the drilling or ice-melting principles. These techniques require large amount of input energy to drill or melt down through several-km ice crust, which may contain fragments or even layers of more dense material. The possibility of using solar energy to power a penetrator is limited by the reduced solar flux near Jupiter and long working path of the penetrator. This leads to the need of using nuclear power for drilling/melting process, probably utilizing a radioisotope power system.
The very first challenge for a penetrator that starts drilling on the top of the ice shell – is upper layer of cold and hard ice. If successfully dealt with this and other possible obstacles inside deep layers of ice, at the end of its journey, the penetrator will deploy a robotic probe – an autonomous underwater vehicle that will seek for possible signs of life forms with its sensors.
The penetrator, being heavy drilling/melting machinery, has to be gently delivered to the surface of Europa, so a huge amount of rocket fuel has to be burned out for deceleration and landing. This puts the lander's weight up and shortens the list of launch vehicles that can fit such mission.
Europa Direct Encounter Mission (EDEM) - is a brand new concept of a robotic landing mission to Europa with optional kinetic ice penetration capabilities. The mission concept is based on the application of an ultra-strong momentum exchange tether that serves for efficient deceleration of the Europa landing module and acceleration of the ice-penetration assets that leave a long tunnel in ice after the impact with the surface. This results in a reduced amount of rocket propellant, needed to decelerate the lander, and in reduced path in ice, which increases the possibility of reaching the subsurface ocean.
EDEM is developed with respect to the evolving technologies that will become mature by the end of the next decade, when more information about Europa's ice crust is available from the Europa Multiple Flyby Mission. Particulary, ultra-strong carbon-nanotube tether, similar to one that might be used in construction of the Space Elevator, is in the core of the concept. Such tether, spun up by a pair of ion thrusters, is capable of providing velocity of several km/s on its endings. At the moment of tether release spacecraft modules, attached to the endings of the tether, will experience increase or decrease in their linear velocities depending on the direction of the tether rotation. Thus, on one hand, penetration assets will experience addition in their orbital velocity, increasing the impact energy to form a deep tunnel in the ice, and thus reducing the working path of the drilling or ice-melting equipment, which will be delivered to the impact site by the landing module. On the other hand, a lander will lose significant amounts of its delta-v, which will significantly decrease the amount of rocket propellant, needed for deceleration and landing on the surface of Europa.
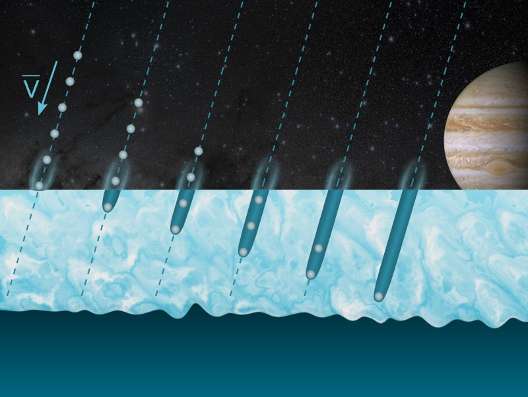
Penetration through the Europa's ice crust with kinetic impact requires application of dense projectiles, capable of withstanding high heat flux. Since the path of the projectile in ice is related to its velocity and diameter, maximization of these parameters is highly desirable. Unfortunately, maximization of the projectile's diameter is limited by the weight constraints.
Another possible way of increasing the penetration depth is through applying several projectiles aimed in the same point. In this scenario a chain of impactors must be oriented along the velocity vector, so each new impact will increase the depth of the well left by the previous impact.
The shape of the projectile also plays an important role in the formation of an elongated well. The problem of selecting the proper shape, size and amount of projectiles is an ongoing research. Due to the small size of impactors the diameter of a well should not exceed several meters, with preferred value of 1 m or even less.
The increase of the impact velocity can be achieved by several means. One of them is in the selection of an appropriate flight scheme and another is in the application of the momentum exchange tether that is severed or released at the approach to the target.
The increase of the impact velocity can be achieved by several means. One of them is in the selection of an appropriate flight scheme and another is in the application of the momentum exchange tether that is severed or released at the approach to the target.
In order to be more efficient than a regular rocket engine, a momentum exchange tether must be made of an extremely strong and light material. The preferred tensile strength of such material must be over 65 GPa (9,500 ksi), which is theoretically achievable for future fibers based on carbon nanotubes with density of ~1.3 g/cm3 (81 lb/ft3).
With desired tangential velocities at the endings of the tether, its length will exceed several hundreds of kilometers. Considering a range of issues connected with deployment of such long tether in Low Earth Orbit and significant time, needed to reach the final angular velocity, best solution is to accelerate the tether's revolution during the interplanetary flight phase.
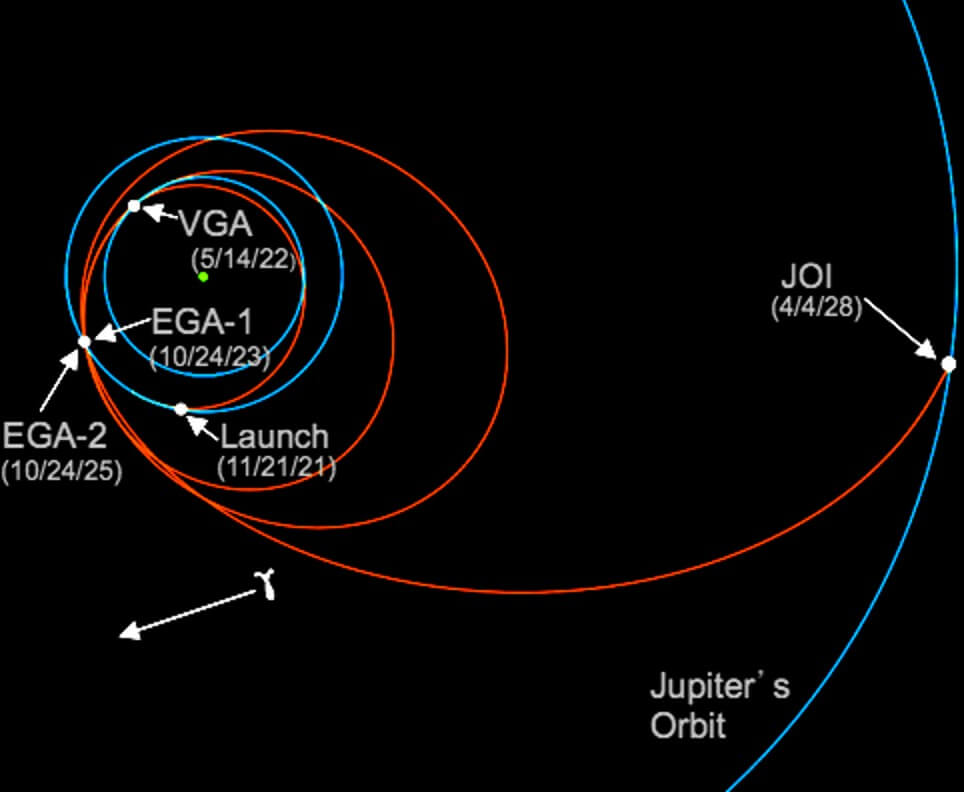
The angular acceleration can be provided by a pair of ion thrusters that will start working at the very beginning of the passive interplanetary flight, till reaching desired velocity on the approach to the Jovian System. The interplanetary flight will take up to 6-7 years, considering selection of an efficient trajectory with multiple gravity assist (GA) maneuvers near Earth (EGA) and Venus (VGA). Similar trajectories have been selected for all spacecraft that traveled to outer planets and beyond, including Voyagers, Gallileo, Cassini, Juno, as well as for the the upcoming flyby mission to Europa.
Such a long time of the flight is just enough for a pair of ion thrusters to accelerate the tether to the desired angular velocity. The thrusters will be mounted on two separate modules on opposite sides of the tether. One of them consists of the Europa lander and kinetic ice penetration assets (optionally). Another - is an empty rocket's upper stage that will be thrown away into a deep space after tether release on the approach to Europa.
Ion thrusters will be fed from two power sources: lander's radioisotope generator and solar pannels, mounted on the rocket's upper stage. Being an extremely efficient, ion thrusters will slowly accumulate the portion of input energy into the tether's rotation that finally will be shared between two spacecraft modules at the moment of tether release.
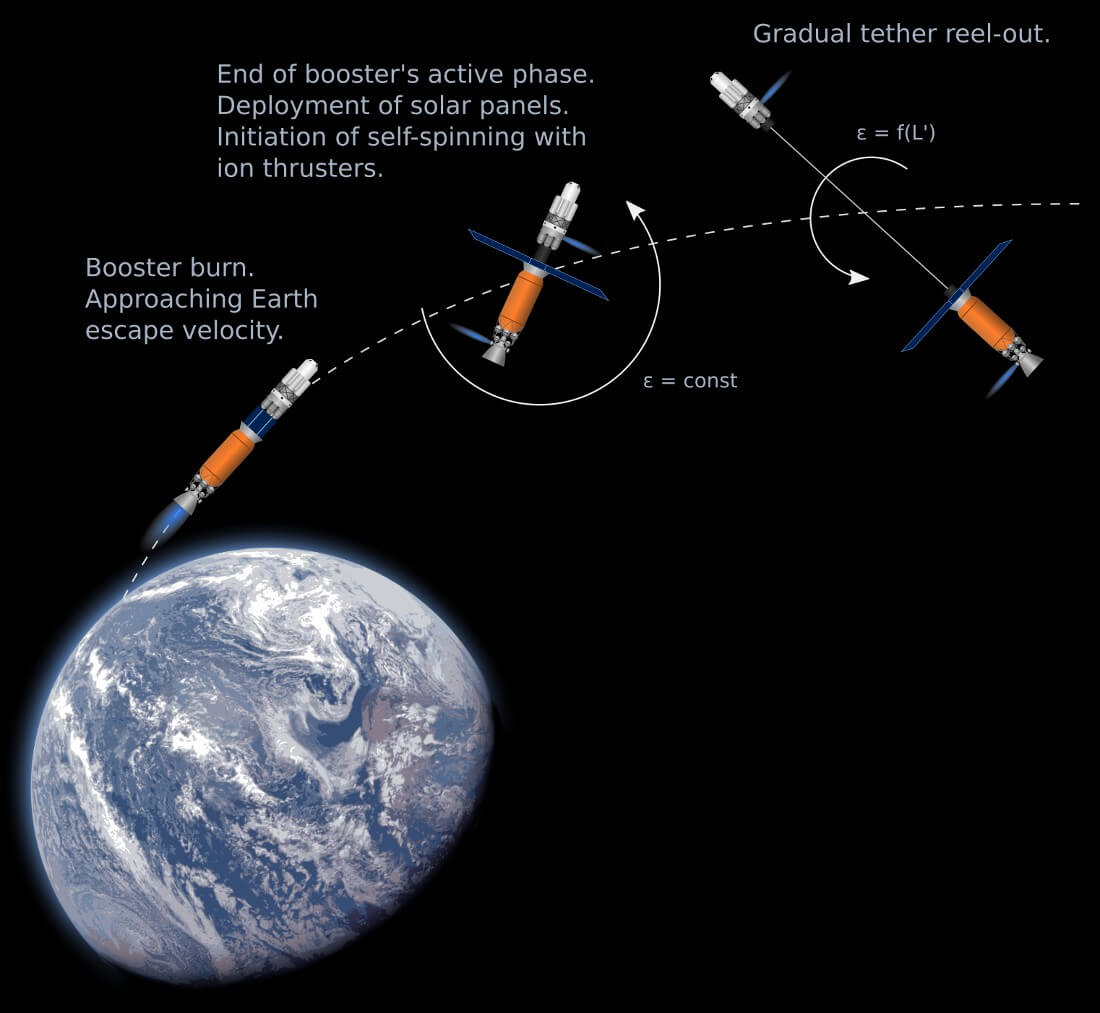
Considering the required length and strength of the tether, it will be a significant addition in weight and volume to the spacecraft, but less than the equivalent rocket propellant. With weight minimization in mind, the tether will be exponentially tapered, with largest section in the region of rotating system's center of mass, and smallest - near the endings. At the moment of the spacecraft launch from the Earth's surface the tether will be wound around the spool. During the interplanetary flight phase it will be slowly released, while gaining angular momentum, to preserve the desired tension and keep the values of the overloads on the tips in the allowed range.
As the spacecraft will approach Earth and Venus several times during the interplanetary flight, executing gravity assist maneuvers, solar panels will generate more energy, and ion thrusters will produce higher torque. This results in a non-uniform angular acceleration, so that most part of the angular momentum will be produced in the first half of the flight time.
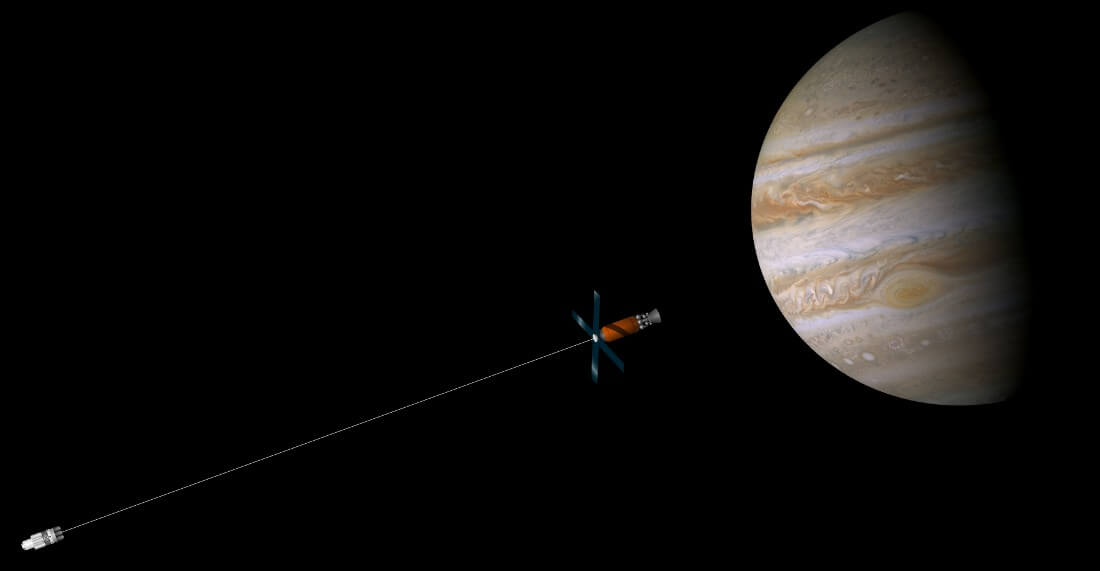
At the approach to Jupiter the tether will be fully unreeled, stretching on several hundred kilometers to preserve permissible values of the spacecraft module's overloads, that range from 10 to 30 units. With such a long tether the whole momentum exchange system will be rotating with very low angular velocity, which makes it possible for steering engines to compensate the errors in direction and attitude.
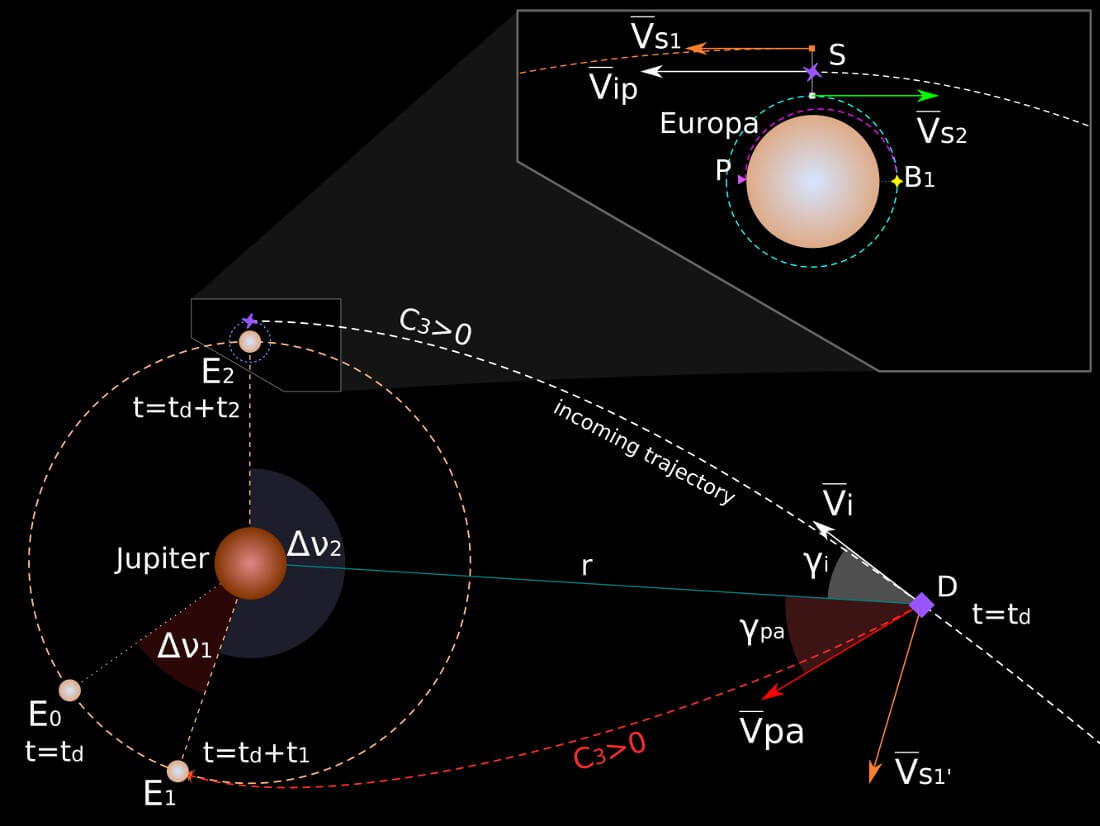
There are many possible scenarios of tether release for the spacecraft modules, but not all of them are efficient. Considering the need in maximizing resultant velocity of the penetration assets and minimizing resultant velocity of the lander, the optimal spacecraft separation scheme consists of two steps.
According to this scheme an angle between the spacecraft velocity vector and the direction into the center of Jupiter, at the moment of entering the Jupiter's sphere of gravitational influence, must be held strictly to ensure that the spacecraft's incoming hyperbolic trajectory has perijove very close to the Europa's orbit and Europa will be in the right position at the moment of encounter.
At the distance r from Jupiter penetration assets will separate from one of the spacecraft modules, so that their resultant trajectory is targeted towards the oncoming Europa. This will increase the impact velocity by the Europa's orbital velocity and a bit more due to the Europa's gravity. In such scenario the impact velocity can reach 30..40 km/s (67,000..90,000 mph) depending on the distance from Jupiter at the moment of separation.
After separation of penetration assets the rest of the rotating spacecraft system will lose a portion of its angular momentum, but will keep enough energy for the second separation to be efficient. The tethered spacecraft will keep moving along its trajectory, chasing the outgoing Europa to meet it in the perijove.
At the moment of close approach to Europa the spacecraft modules will separate from the tether in opposite directions, so that the lander will be targeted against the system's linear velocity vector and the counterweight (empty booster) will be targeted along it. Thus, the lander's resultant velocity is the difference between its tangential velocity of the rotation motion and the spacecraft's linear velocity. In the best possible case the value of the lander's resultant velocity will be close to the Europa's orbital velocity, which means that it can be directly put in the descent trajectory!
But it would be safer to put it into the Europa Low Orbit with altitude of several tens of kilometers at first place. After a series of orbit correction maneuvers and finding the impact site, the lander can use its low-thrust chemical rocket engines to land near it. After the landing the penetrator will be deployed and the well in the ice crust will serve as a guiding route for it to sink down to the deep layers of the pliable warm ice, or directly into the liquid ocean.
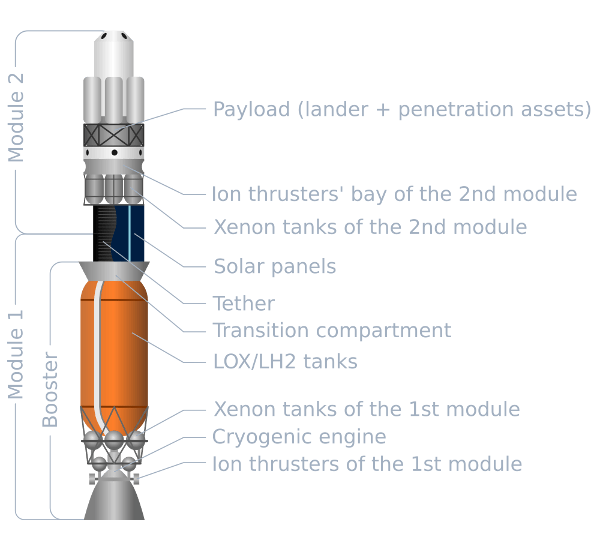
Two spacecraft modules, which are represented by the booster (1st module) and the lander (2nd module), along with the tether that connects them, form the core of the interplanetary spacecraft. At the moment of launch from Earth these modules are assembled in a single piece and the tether is reeled on the spool that is placed between the modules.
The booster, is a modified version of a Centaur rocket stage that utilizes high-impulse cryogenic components: liquid oxygen and liquid hydrogen. It will accelerate the spacecraft to reach the required Earth escape velocity. After its end of work the booster will not separate from the spacecraft, but will serve as a counterweight in the tethered system. For these reasons it will be equipped with ion thrusters to produce lateral impulse and folding solar panels to provide the energy for thrusters.
The lander, which makes up the spacecraft's second module, is equipped with same ion thrusters, producing the same impulse but in the opposite direction, which results in a pure angular momentum, applied to the tethered system. Application of thrusters with equal thrust allows to eliminate undesirable forces that may change the spacecraft trajectory.
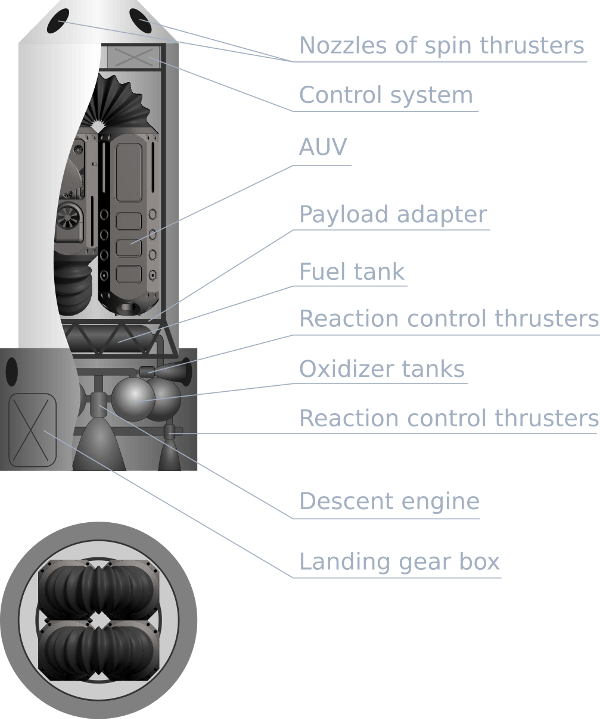
The main lander's payload is an autonomous underice vehicle (AUV) powered by radioisotope power system (RPS). The required output power of the RPS is estimated in the range 7-10 kW. It utilizes a Stirling Converter to generate electricity, so the efficiency of the power conversion process can reach 35%. This is very high value compared to thermoelectric generators that have been used for all previous deep space missions with a nuclear power source.
Due to high power output and with regard to safety and design optimization considerations, there probably will be two separate nuclear power systems, integrated in the AUV construction. During the interplanetary flight, the energy produced by generators, will be used by the second module's spin ion thrusters. So there is no need for mounting additional solar panels. After landing on Europa the energy produced by generators will be used to produce ice-melting heat and electricity, consumed by the AUV’s systems. In the case of successful application of the kinetic penetration assets, the AUV will easily get to the deep ice layers trough the well, left after the impact, so the total generator output power of 7-10 kW will be enough for penetrating through warm layers of ice.
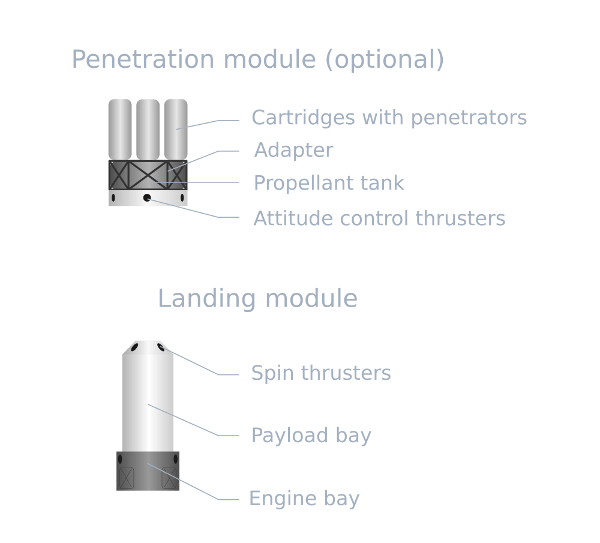
The kinetic penetration assets, is an optional payload. Their efficiency still has to be proven by the series of numerical simulations and laboratory tests. This is the subject of an ongoing research. If included in the payload, they probably will be attached to the second module. The set of impactors will be mounted on the adapter, equipped with attitude control engines. After separation from the rotating spacecraft these engines will be used to form the sequence of impactors, oriented along the vector that is collinear to the velocity vector at the moment of impact. This will ensure that all impactors will hit the ice in the same point, which will ensure formation of a deep well.
The key component of the lander's payload is an autonomous underice/underwater vehicle (AUV). Its main purpose is to efficiently penetrate through the Europa's ice crust, analyze composition of the inner ocean and seek for possible signs of extraterrestrial life.
It should be able not only to survive in the tough environment of the unexplored icy world, but also to freely move in water and ice, overcome any obstacle on its way and autonomously make decisions. These requirements define a new frontier for modern robotics and artificial intelligence.
The need in ice-penetrating capabilities to be incorporated in the AUV design puts the limit on its shape and size. A series of researches devoted to the development of ice-melting robotic probes has shown that with power input of ~10 kW, the probe's diameter shouldn't exceed 0.2-0.3 m (8-12 inches). This defines the elongated shape for the AUV, and, with mobility requirement in mind, it should probably be a snake- or worm-shaped robot.
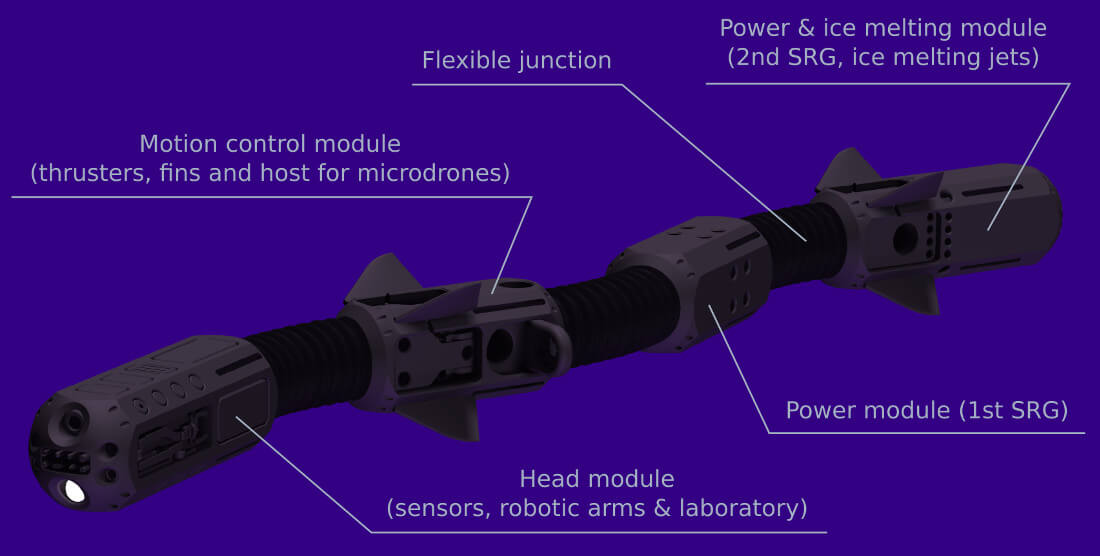
The Iceworm is a prototype of a robotic probe that will be delivered to the Europa surface by the EDEM spacecraft's landing module. It consists of four modules with octagonal section, connected by flexible junctions, capable of bending into the U shape. This allows the AUV to be compactly packed inside the lander with high packing density.
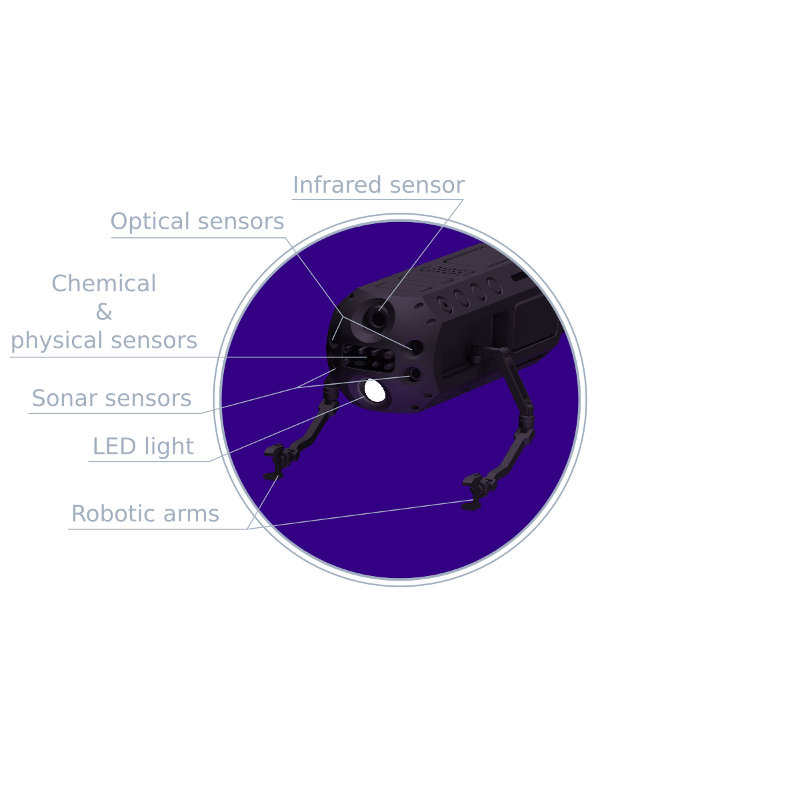
The most valuable payload of the Iceworm and the whole mission – is a chemical and biological micro laboratory, placed in the head of the AUV. Its frontal facet is equipped with a powerful LED light, two optical cameras, sonar and an infrared sensor. In order to be able to grab specimens, the first module of the Iceworm is equipped with two robotic arms, capable of delivering samples into the vaults of the inner laboratory. These vaults are represented by the number of drawers of different sizes placed on side facets of the head module.
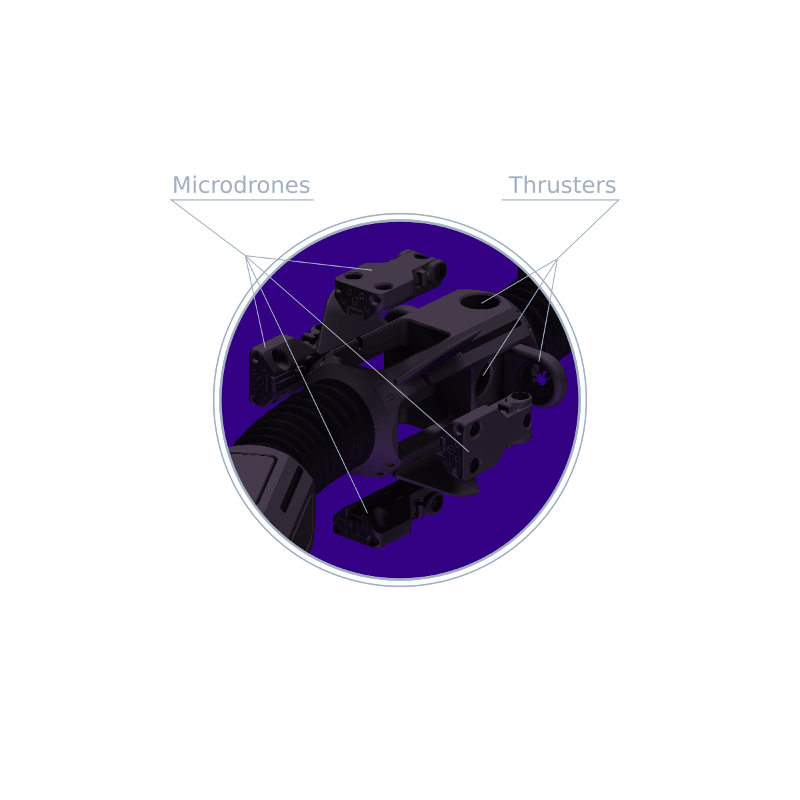
Second module - is responsible for motion control. Here the most part of the underwater thrusters are placed: two lateral, with a similar set installed in the tail module, and two longitudinal. Last ones, in combination with water pumps in the tail module are responsible for longitudinal motion of the AUV.
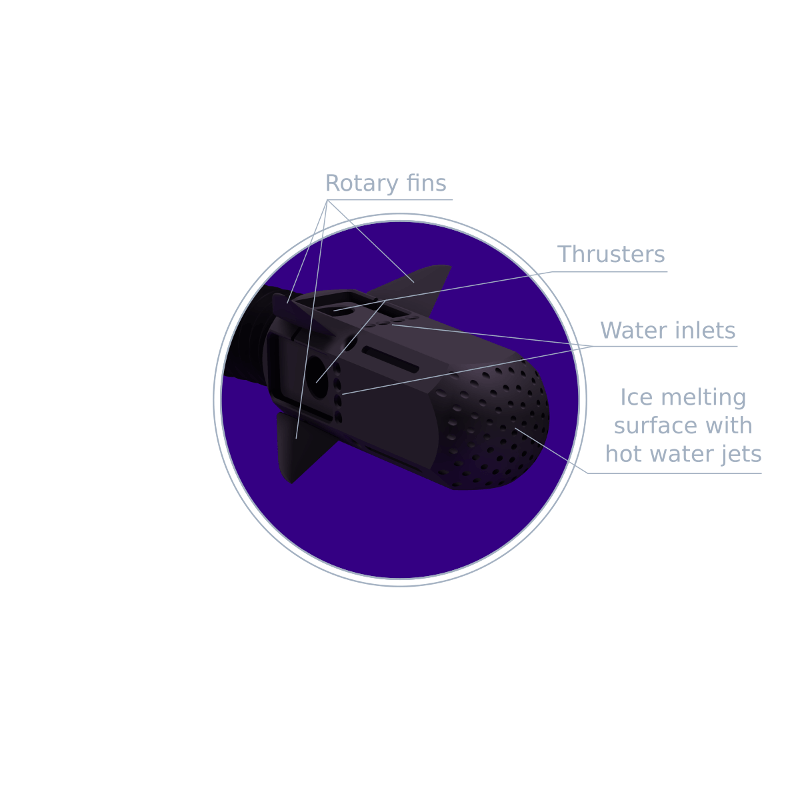
The four pieces of folding rotary hydrodynamic surfaces in the control module, complemented by the similar set in the tail module, allow it to perform efficient maneuvers underwater. In combination with flexible inter-module junctions they can be used for executing snaky movements to complement or replace the propulsion function of the longitudinal thrusters and tail pumps.
Another important purpose of the second module - is to host four microdrones. These satellites are crucial for solving risky tasks and grabbing tiny samples of materials. They can operate autonomously, or via the power cables. Microdrones are equipped with small robotic hands and can efficiently maneuver in water using a set of tiny folding and rotary thrusters. They are also equipped with micro-sensors and due to the small size of 0.3 –0.4 m (1 – 1.3 ft) in length can take samples from caves and other types of vaults in the sea floor.
Two last modules of the Iceworm are dedicated to the nuclear power sources. The Stirling Radioisotope Generator (SRG) of the third module produces more than a half of the electrical energy, consumed by all systems of the Iceworm. The tail module contains a second SRG. It can work in two modes - generator and heater. The last one is essential for heating the water, sucked in from the melted exterior ice and pushing it out from the jets in the tail to melt the ice in front of it. Thus, during the ice penetration phase of its motion Iceworm moves backwards.
After reaching the liquid water, the Iceworm will start its descent to the bottom of the Europa's underice ocean, taking water probes on its way. It has to withstand colossal pressures, so the outer shell of the AUV’s modules has to be made of steel, covered with a layer of protective coating. Due to the unknown chemical composition of the subsurface ocean on Europa, this coating has to be chemically stable and resistant to scratches. One of the possible solutions is to use self-healing coatings. The same requirements apply to the material of the inter-module junctions that, in addition, has to be flexible and durable.
The design of the Iceworm, targeted at obtaining an AUV with high survivability and maneuverability, puts tough requirements to its core systems and materials. But with respect to evolving technologies it might be a feasible solution for the payload of the future Europa ice penetration mission.
Rapidly evolving complexity and resourcefulness of the advanced self-learning algorithms broadens the boundaries of tasks that can be solved by autonomous vehicles. Equipped with an electronic brain, trained in similar environment, and in combination with the abilities to easily melt its way in the ice, dive down to the abyss, locate targets and take samples and, finally, find its way back to the surface, Iceworm becomes an ideal hunter for extraterrestrial underwater life.
So when it reaches Europa and gets through the ice…
...just may be, on its long way down to the bottom of the alien ocean, Iceworm will discover something we haven't even expected!
I am an aerospace engineer, software developer, data scientist and artist. I used to think of myself as a visionary person that has its own and quite precise view at the future of space exploration. This vision reflects in several concepts of space tech, and EDEM is only one of them. I believe the main mission of this dare, complex a may be utopic project is to unearth the potential and scientific value that can be delivered by using an uncommon combination of existing and developing technologies. The future of scientific breakthroughs does not only depend on the budget of governmental space agencies, but mainly on the understanding which technologies are critical in development of new-generation space missions and the efforts the society as a whole has to make to develop and maturate these technologies. Regardless of how sceptical we are about space tethers and space elevators, without proper efforts we are doomed to remain unaware of their ability to reshape the way we travel to and in space; regardless of how we are concerned about nuclear energy, without sufficient amount of plutonium any robotic probe is almost useless in the far regions of the Solar System. And this relates to many other technologies with great potential of use in space. If we are keen on finding the answers on the most intriguing questions about space we have to take an active position and find the ways to develop and invest in these technologies today.
The EDEM project was presented at the 68th International Astronautical Congress that took place in Adelaide, Australia during 25 – 29 September 2017. The paper is available for download here.
If you are interested in details or willing to help the project, please feel free to write me!